麦克纳姆轮简称“麦轮”。是一种可以进行全方位任意移动的轮子。它由轮毂和围绕轮毂的辊子组合而成,同时麦克纳姆轮得辊子轴线与轮毂轴线成45°夹角。在轮毂的轮缘上斜向分布着许多小轮子,叫辊子,因此轮子可以横向滑移。辊子又是一种没有动力的小滚子,小滚子的母线十分特殊,当轮子绕着固定的轮心轴转动得时候,各个小滚子的包络线会为圆柱面,所以该轮雀陵能够连续地向前滚动。由四个这种轮加以组合,便可使设备实现任意方位移动的功能。
并且麦克纳姆轮有着互为镜像关系的AB轮,如果A轮可以向斜向左前方、右后方运动,那么B轮就会向斜向右前方以及左后方移动。根据我们高中学习到的物理知识可知,速度是可以正交分解的,那么A轮可以分解成轴向向左,以及垂直轴向向前的速度分量;或者轴向向右,以及垂直轴向向后的速度分量。这样下来,B轮的速度分量和A轮便会成为镜像关系啦。
在知道了A、B轮的速度分量之后捏,咱们就可以进行关系组合啦。对于一个四轮的麦克纳姆轮来说,无非就是以下的几种组合方式。AAAA、BBBB、AABB、BBAA、ABAB、BABA、ABAA、BABB...(这是要累shi我。。。)
是不是以上几种组合方式都能够实现任意方位的移动呢?答案是:NO!下面给大家例举其中一个正确例子和错误例子,剩下的大家可以自行推理哟。
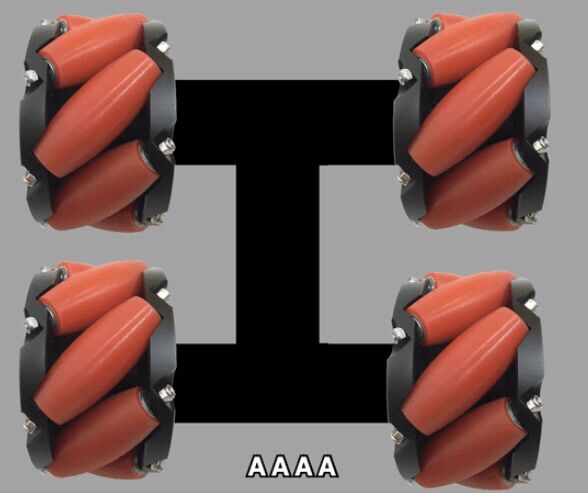
AAAA,说实话这个一看呀就不靠谱,但是我们还是洞粗要来分析一下,因为这个非常容易和清楚的发现它到底错在哪里。之前我们说过,A轮的速度分量要么是前+左,要么就是右+后,当4个轮子都想要向前转动的时候,每个轮子都会有一个向左方向的速度分量,这样便会导致整个底盘在前进的时候一定会向左移动。同理纳岁镇,后退的时候也一定会向右方运动,这就很难继续讲下去了,因为这个东西已经不受控制的到处乱跑了。。这必然不是我们所需的任意方向移动。
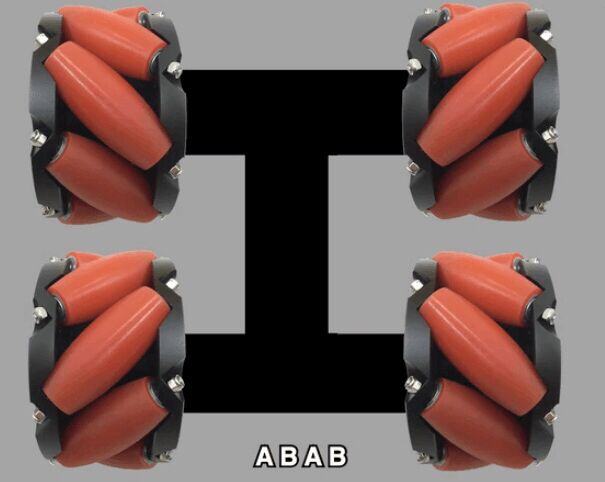
正确的麦克纳姆轮分布是ABAB。当四个轮子都向前方转动的时候,AB轮可以相互抵消掉轴向的速度,这样就只剩下向前的速度了,底盘就可以前进不会跑偏咯。后退也是同样的道理。如果当A轮正转,而B轮反转的时候,向前以及向后的速度便会抵消,只会剩下向左的速度,这样底盘便会向左平移;相反,如果A轮反转,B轮进行正转,那么底盘便会向右平移;底盘左侧的车轮正转,右侧的车轮反转,就可以实现底盘向右的旋转方式,反之,底盘就能够向左旋转啦。

通过对比普通的车辆我们能够发现,普通的车辆在移动的时候,轮子都是向同一个方向转动的。而使用麦克纳姆轮的车辆在进行任意方向运作的时候,每个轮子的运动方向都是不同的,因此麦克纳姆轮要想做到真正意义上的任意角度移动,那么每个麦轮都需要一个单独的电机驱动。
如此一来,就还需要一套控制系统来掌握每个轮子的转向速度以及方向。
在麦克纳姆轮问世后,它便在工业生产领域中得到了普遍的应用。如在环境恶劣,空间十分狭小的环境,采用麦克纳姆轮技术的AGV小车、叉车等设备便可进退自如。和传统的轮式车辆相比较,昆山市叶茂机电设备有限公司还基于麦克纳姆轮技术研制的无人搬运AGV小车可以甩普通搬运车几条街,因为叶茂AGV小车不但能够在空间狭窄的空间使用,其工作效率也是一车顶三人,大大节约了企业的人工成本,还着实增加了企业的效益和效率。



